Лазерный локатор. Применение
Технический директор компании RIEGL
Технический директор компании RIEGL, доктор Андреас Ульрих о лидарах с оцифровкой формы сигнала, однофотонных и гейгеровский лидарах в интервью главному редактору проекта SPAR 3D Шону Хиггинсу.
Андреас Ульрих доктор наук в области электротехники Венского технологического университета и автор диссертации на тему "Высокое разрешение оптического доплеровский радиолокатора" (1987-1990). С 2001 года он читает лекции по радиолокации в Венском технологическом университете. С 2006 года является техническим директором компании RIEGL.
SPAR 3D выпустил обзор, посвященный будущему воздушных лазерных сканеров. Сотрудники SPAR 3D опросили ряд экспертов в области лазерного сканирования, задав им вопрос «Каково, по вашему мнению, будущее однофотонных и гейгеровских лидаров? Что из этого является рекламной шумихой, а что нет?». В этом обзоре большинство опрошенных специалистов сошлось во мнении, что данные технологии окажут мощное воздействие на рынок лазерного сканирования, но тем не менее, очень важно отметить, что «классические», или «обычные» лидары все еще обладают существенными преимуществами. Поскольку в данном обзоре очень поверхностно упомянули об этих преимуществах, SPAR 3D опубликовал в полном объеме интервью с техническим директором RIEGL доктором Андреасом Ульрихом. Его ответы дают исчерпывающее объяснение ценности технологии анализа полной формы сигнала и позволяют понять причины, по которым компания RIEGL продолжает развивать эту технологию.
Шон Хиггинс: В чем состоят сильные стороны технологий, сравниваемых с «линейным» лидаром?
Доктор Андреас Ульрих: Использование термина «линейный» относится к более старым методам обработки аналогового сигнала лазерного отражения, а не к более совершенному цифровому режиму обработки лидаров Riegl с оцифровкой формы сигнала. Запатентованные решения по оцифровке полной формы сигнала от Riegl отличаются от указанных «линейных» лидаров очень существенно. С технической точки зрения, разница состоит в том, что анализ сигнала, поступившего с приемного элемента лидара (фотодетектора) выполняется более точно, более детально и с получением атрибутивных характеристик отражения. Лидары с оцифровкой полной формы сигнала (далее по тексту - ОПФС) обладают необычайной точностью, поскольку эта технология позволяет очень точно определить дальность, у них низкий пространственный «шум», они позволяют получать большое количество отражений от одного импульса, определять форму каждого сигнала и извлекать из нее информацию об объекте, от которого он отразился, а также позволяют выполнять несложную радиометрическую калибровку.
Теоретически однофотонные и гейгер-лидары обладают большим потенциалом по скорости сбора точек отражений, однако при этом теряется как пространственная точность, так и информация об интенсивности сигнала. Радикальное увеличение количества полученных в секунду точек отражений у гейгеровского и однофотонного лидаров может на первый взгляд ввести в эйфорию. Тем не менее, недостаток пространственной точности и полная потеря атрибутивной информации, которая могла бы содержаться в точках лазерных отражений в конечном итоге приводит не к улучшению, а к ухудшению результата. Мы же ведь все хотим, чтобы наши карты в итоге становились все более точными, но никак не менее. Рост рынка лазерного сканирования всегда базировался на том, чтобы получать все более информативные и точные данные за меньшую цену.
Меньшая стоимость получения данных и более высокая эффективность картографирования территорий - вот основные преимущества, которые обычно навязчиво предлагаются потенциальным пользователям. Теоретическое увеличение скорости сканирования полностью разбивается о реальность – например, для сверхбыстрой работы гейгер-лидара требуются только ясные дни и прекрасные погодные условия. Получение данных – это лишь один из компонентов эффективности: данные также нужно обработать и поставить заказчику. Проблемы, возникающие на этих этапах использования «новых» технологий, полностью обесценивают преимущества прироста скорости.
Шон Хиггинс: В чем состоят основные недостатки новых технологий в сравнении с лидарами с оцифровкой полной формы сигнала?
Доктор Андреас Ульрих: Точки, создаваемые при работе однофотонных и гейгер-лидаров являются полностью синтетическими и не наследуют свойства объектов, от которых они отразились. По ним нельзя определить, отразились ли они от одного или нескольких объектов, или вообще были получены за счет интерполяции или ресэмлинга. Это – критический недостаток гейгер-лидаров. Прочие недостатки - отсутствие данных об интенсивности отраженного сигнала, неспособность пробить даже редкую растительность, а также невозможность регистрации нескольких отражений от одного импульса.
Однофотонные лидары - по сравнению с гейгер-лидарами – более чувствительны к множественным отражениям. Теоретически, они могут проводить измерения на всех типах объектов – от проводов до грунта под кронами деревьев. Однако, как показали эксперименты, проведенные USGS (Геологическая служба США) и представленные на конференции ILMF в 2016 году, точность определения дальности у подобных систем значительно хуже, чем у систем с ОПФС-лидарами. Причина кроется в некорректной обработке сигнала. Ошибки определения дальности на уровне более 50 см сплошь и рядом возникают на объектах с изменяющимися размерами и отражательной способностью.
Классические лидары работают на очень разных длинах волн – 532 нм (зеленый), 1000 нм (ближний ИК), 1550 нм (средний ИК) и далее в сторону теплового диапазона; это позволяет реализовать концепцию многозонального лидара, что позволяет получать, к примеру, данные о состоянии леса. Однофотонные лидары на данном этапе работают только в видимом диапазоне, и в обозримом будущем здесь ничего не поменяется.
Шон Хиггинс: Могут ли новые технологии однажды заменить обычные технологии лазерного сканирования (вроде лидаров с оцифровкой полной формы сигнала)? Почему да или почему нет?
Доктор Андреас Ульрих: Это наиболее актуальный вопрос, занимающий умы тех, кто занят сейчас в отрасли лазерного сканирования: заменят ли эти технологии то, что сейчас принято называть лидаром. Мой ответ – нет. Оба новых варианта лидаров являются мощными инструментами тогда, когда их применяют в правильных ситуациях. Гейгер-лидар уже сейчас является наилучшим методом для быстрого получения цифровой модели рельефа в пустынных регионах или в районах боевых действий, где очень нужно оставаться вне зоны поражения ракетами ПЗРК, особенно если дело происходит в чистой атмосфере и на территории нет растительности.
В районах, покрытых растительностью, сканер с оцифровкой полной формы сигнала показывает превосходные результаты по части проникновения. позволяют дешифрировать по форме сигнала точек множество типов объектов, а не только точки, используемые для построения поверхностей, в том числе столбы, провода, сетки, и прочие мелко детальные объекты. Сканер с оцифровкой полной формы сигнала является наилучшей технологией при решении огромного количества задач, и останется таковым – при этом непрерывно эволюционируя и повышая скорость работы, и при этом еще и оставаясь непревзойденным в части точности. Сканеры с оцифровкой полной формы сигнала компании RIEGL обеспечивают скорость обработки данных лазерного сканирования, близкую к реальному времени. Это открывает новые возможности по применению данной технологии при решении задач по быстрому реагированию при спасательных операциях. Все это RIEGL уже сейчас демонстрирует в лице новейшего решения – воздушной лазерной сканирующей системы , которая позволяет снимать по 450 км 2 в час при плотности 8 точек на 1 м 2 и это все в сочетании с наибольшей скоростью обработки данных и очень высоким качеством этих данных, которое уже привычно для пользователей.
Шон Хиггинс: Являются ли однофотонные и гейгер-лидары зрелыми технологиями? Считаете ли вы, что им следует продолжить развитие, чтобы полностью раскрыть их потенциал?
Доктор Андреас Ульрих: Однофотонный лидар по существу является обычным «линейным» лидаром, основанным на использовании фотоумножителей; гейгер-лидар – в целом не «линейный» - все это отнюдь не новые технологии. Тем не менее, примение эти технологические решения при коммерческой съемке является новым. Согласно заявлениям создателей однофотонного лидара (на ILMF-2016) технология нуждается в улучшении и будет совершенствоваться посредством добавления данных об амплитуде принятого эхо-сигнала. Это было впервые применено в лазерном сканировании много лет назад – когда первые атрибутивные характеристики точки лазерного отражения описывались в виде 8-битного значения интенсивности. Так что в этом отношении технология однофотонного лидара еще очень незрелая.
У гейгер-лидаров длинная история в военном сегменте, там уже было использовано и применено огромное множество всяческих оптимизаций. Тем не менее, обмануть законы физики не удалось. Одно из фундаментальных ограничений – недостаточная способность детектора гейгер-лидара достаточно быстро восстановиться после срабатывания для того, чтобы отловить какие-либо дополнительные сведения об отражениях. Другое ограничение – он никогда не сможет обеспечить оценку истинной мощности отраженного сигнала, что является критичным для компенсации ухода момента регистрации отраженного импульса и не позволяет улучшить точность измерения дальности.
Шон Хиггинс: Есть ли у компании RIEGL планы по производству лидаров, основанных на технологиях однофотонных или гейгер-лидаров?
Доктор Андреас Ульрих : Как я уже говорил, мы считаем ОФПС-лидары Riegl превосходной технологией. ОФПС-лидар необычайно точен, поскольку обеспечивает высочайшую точность измерения дальности, низкую пространственную «шумность» данных, обладает возможностью регистрации очень большого количества отраженных от одного импульса сигналов, дает массу характеристик формы отраженного сигнала для каждой точки, и позволяет произвести радиометрическую калибровку для каждой точки. Наши пользователи выстраивают свои бизнес-модели, рассчитывая на высокое качество данных и возможность использования атрибутивных характеристик точек, которые они получают с наших лидаров. Все прочие технологии, которые мы здесь обсуждали, не могут обеспечить вышеуказанных характеристик. Поэтому мы будем продолжать совершенствовать именно технологию лидаров с оцифровкой полной формы сигнала.
Если вы видели автономные автомобили на фотографиях или вживую, то заметили – сверху у них на крыше закреплена какая-то странная штука.
Иногда она похожа на сирену, как в случае с прототипами Waymo от Google, что придает им вид очаровательного полицейского автомобиля.
Но, чаще эта штуковина напоминает крутящуюся консервную банку, установленную на распорках.

Это устройство на беспилотных автомобилях является лидаром, оборудованием, которое наделяет машину «зрением».
Слово лидар (LIDAR) состоит из начальных букв четырех английских слов – Light Identification Detection and Ranging, что означает «обнаружение, идентификация и определение дальности с помощью света».
Автомобильный лидар в беспилотном автомобиле – это самая дорогостоящая штука. Ценой $75 000, лидар стОит дороже, чем многие автомобили. А между тем, это устройство лишь одно из многих, которым нужно оснащать беспилотный транспорт.

Однако, в этом году данная ситуация может измениться благодаря появлению так называемых твердотельных лидаров высокого разрешения и стоимостью всего несколько сотен долларов. На самом деле, слово твердотельные – не очень корректно. Лидары нового поколения отличаются от предыдущих, своей неподвижностью (статичностью).
Но, их изобретение серьезно приближает момент массового появления беспилотного транспорта на дорогах. Поэтому стоит понять, что такое автомобильный лидар, и в частности статичный (твердотельный).

Слово «лидар» передает саму суть его функционирования – это радар, который работает на световых волнах. Вспомнив школьную физику, мы знаем – излучая радиоволны, радар определяет расстояние до объекта на основании времени, которое требуется радиоволне для отражения от объекта.
Лидар действует по схожей схеме, но использует для этого не радиоволны, а короткие импульсы света высокой мгновенной мощности. Для получения более точной информации, лидары используют инфракрасное излучение и ближнее ультрафиолетовое.

Но, беспилотному автомобилю нужны данные о десятках объектов вокруг. Поэтому он крутится вокруг своей оси, испуская множество световых вспышек, и таким образом формирует из «облака точек» трехмерное 360-градусное изображение окружающей обстановки. И делать он это может в любых средах, погодных условиях и независимо от времени суток.
В этом музыкальном клипе группы Radiohead видно, как из таких «точек» формируется картинка.
Чтобы беспилотные автомобили могли без участия человека передвигаться в пространстве, им требуется комбинация видеокамер, радаров и лидаров. И лидар выполняет критически важную функцию – он дает автомобилю представление не только о собственной локализации, но и о местоположении окружающих объектов.
GPS в данном случае непригодно – оно определяет местоположение с формированием круга диаметром около 5 м, а лидар делает это с точностью до 10 см.

Уровень автономности – это международные критерии, принятые, дабы объяснить, насколько тот или иной транспорт является самостоятельным.
Существует 6 уровней автономности

И вот лидар необходим при автономности уровня 4 и выше.
Что такое статичный автомобильный лидар
На сегодняшний день большинство лидаров – это дорогостоящие подвижные устройства.
Конечно, как и все технологии, лидары со временем стали дешевле и уменьшились в размерах. Но, пока они стоят от $8 000 до $80 000, и быстро выходят из строя.
А вот статичные лидары – другое дело. Сделанные главным образом из кремния, в них нет подвижных частей и используется лазер с изменяемой длиной волны. Такое устройство легкое, маленькое, потребляет мало энергии (работает на батарейке АА), быстрое и точное, работает при любых погодных условиях, и стоит не тысячи, а сотни долларов.

Технологию статичных кремниевых лидаров изобрела американская компания Quanergy. Полный набор их лазерного сканера сейчас стоит $900, но разработчик обещает постоянно снижать цены, доведя до $100.

Твердотельный лидар не просто дешевле, он очень быстрый, высокоточный и работает дольше. Электромеханический лидар выдерживает максимум 2000 часов, что меньше, чем требуется на год эксплуатации автомобиля, а твердотельный – до 100 000 часов.
Когда беспилотные автомобили станут массовым продуктом
Первый лидар в 1999 году был установлен на автомобиль Jaguar стоимостью около $100 000. В то время лидары с датчиками были настолько дороги, что люди шутили «вы приобретаете лидар и получаете бесплатно в нагрузку Jaguar».

Сегодня эта функция в автомобилях уже стОит $18 000, а с применением твердотельных датчиков цена «лазерного зрения» упадет до $1000.
Предполагается, что первые твердотельные лидары Quanergy начнут устанавливать на серийный электромобиль Fisker EMotion с запасом хода до 640 км на одной зарядке.

Выпуск этого автомобиля пока еще большой стоимости – $130 000, запланирован на 2019 год.
А вот массовое появление беспилотных автомобилей, использующих технологию твердотельных лидаров, ожидают в 2020-2023 годах. Считается, что к этому времени минимум одна модель автономного транспорта будет почти у каждого крупного автопроизводителя. И хотя поначалу, скорее всего, способностью к автономности будут наделять дорогие и роскошные модели, очень скоро ею оснастят и бюджетные машины.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter .
Сегодня для исследований атмосферы Земли, ее газового состава, перемещения воздушных масс применяются все новые и новые технологии. Одна из них - лидары наземного, воздушного, космического базирования.
Лида́р (транслитерация LIDAR англ. LIght Detection and Ranging ) - технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах. Принцип действия лидара не имеет больших отличий от радара: направленный луч источника излучения отражается от целей, возвращается к источнику и улавливается высокочувствительным приёмником (в случае лидара - светочувствительным полупроводниковым прибором); время отклика прямо пропорционально расстоянию до цели. В отличие от радиоволн , эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды - достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.
Опыт западных стран свидетельствует об успешном использовании этой не так давно сугубо военной технологии в задачах экологического мониторинга, управления воздушным движением и т.п.
В 60-70-е годы лидары, – лазерные локаторы, работающие в видимом или ближнем ИК-диапазонах волн, – в основном использовались в военной технике. Cегодня они с успехом применяются для решения многих задач, например для мониторинга состояния атмосферы, измерения скорости ветра и т.п. Установленные в районах аэропортов, лидары измеряют ветровые сдвиги на летном поле, завихренность следа самолета и другие атмосферные параметры, знать которые необходимо для обеспечения безопасности взлета и посадки. Хорошие результаты дает применение таких систем для измерения дальности, доплеровской скорости и при формировании изображений объектов, находящихся на летном поле. Так, один из лидаров, выпущенных германской фирмой DLR, установлен в аэропорту Франкфурта между двумя взлетно-посадочными полосами, расположенными близко друг к другу. Он измеряет скорость воздушных вихревых следов от двигателей самолета, приближающегося к одной посадочной полосе, а также перемещения воздуха над другой полосой, вызванного его приближением. Такая информация использовалась службой управления воздушным движением для обеспечения безопасной посадки самолетов по двум полосам. По всей территории Англии установлен компактный робастный лазерный измеритель доплеровской скорости с коническим сканированием, разработанный британской фирмой DRA Malvern. Информация о скорости ветра, получаемая с помощью этих устройств, существенно дополняет данные метеозондов. В 1994-1995 годах в аэропорту Хитроу (Лондон) проходил испытания лазерный измеритель скорости. В числе прочих задач он должен был определять вихревые следы от двигателя самолета и их распространение ветром по летному полю на высоте 30-150 метров. Интересно отметить, что в ходе испытаний был обнаружен неожиданный эффект - возвращение воздушного вихря почти с исходной мощностью в область глиссады примерно через 70 секунд после прохода самолета. Импульсный когерентный лидар на углекислом газе французской фирмы Laboratoire de Meteorologie Dynamique (LMD) применяется для измерения параметров атмосферы и скорости ветра. Дальность действия прибора в горизонтальном направлении - около 12 километров, в вертикальном – вплоть до тропопаузы. Основой аппаратуры лидара служит импульсный СО2-лазер с поперечной накачкой, одномодовым излучением и длиной волны 10,6 мкм. Для расширения луча используется 17-см телескоп Кассегрена со смещенной осью. Управление лучом осуществляется с помощью двухзеркального сканера. Отраженный сигнал собирается тем же телескопом и преобразуется гетеродином. Сдвиг частоты составляет 30 МГц. Принимаемый сигнал оцифровывается восьмиразрядным осциллоскопом с частотой выборки 100 МГц. Для хранения данных используется компьютер. Высокую точность при измерении малых доплеровских сдвигов частоты обеспечивает разработанный в Лаборатории атмосферных исследований НАСА доплеровский лидар, использующий краевой эффект. В устройстве частота излучения лазера выбирается на границе полосы пропускания оптического фильтра с высоким спектральным разрешением. При этом небольшие сдвиги частоты значительно изменяют амплитуду измеряемого сигнала. Доплеровские смещения частоты сигнала, вызванные ветровыми перемещениями, определяются по разности частоты излучения и частоты принимаемого сигнала, отраженного от атмосферы. В лидаре использован импульсный твердотельный лазер на алюмоиттриевом гранате, легированном неодимом (Nd:YAG-лазер). Длина волны излучения - 1064 нм, длительность импульса - 15 нс, ширина полосы - 40 МГц. Отраженные сигналы собираются телескопом диаметром 0,4 м с полем зрения 0,2 мрад. Сканирующая оптика позволяет направлять луч в секторе от 30 до 120о по углу места и от 0 до 360о - по азимуту. Лидарная установка прошла натурные испытания, в ходе которых измерялись ветровые сдвиги на высотах от 200 до 2000 метров. Интервал измерений по вертикали составлял 22-26 метров. Результаты измерений скорости ветра сопоставлялись с данными метеозондов. Расхождение не превысило 1 м/c, а разброс результатов при 10 измерениях оказался менее 0,4 м/с. Специалисты Лаборатории атмосферных исследований отмечают, что столь высокая точность измерений предоставляет уникальные возможности для изучения турбулентных процессов в нижних слоях атмосферы. Помимо научных исследований прибор можно с успехом применять для высокоточных измерений ветровых сдвигов и микротурбулентностей в районе аэропортов. В последние годы растет интерес ученых к изучению газового состава атмосферы Земли. Их внимание особенно привлекает озон как наиболее важный химически активный газ. Озон, находящийся в стратосфере, защищает биосферу Земли от вредного влияния ультрафиолетового излучения Солнца. В то же время большие концентрации озона в тропосфере способствуют развитию парникового эффекта и образованию фотохимического смога, что отрицательно воздействует на животный и растительный мир планеты, а также на здоровье людей. Как показывают наблюдения, с начала 70-х годов каждые 10 лет концентрация озона в тропосфере увеличивается примерно на 10% и на столько же снижается в нижних слоях стратосферы. Это говорит о крайней важности тщательного исследования данных процессов. Высокую точность измерения концентрации озона в тропосфере обеспечивают лидары дифференциального поглощения - наземные или размещаемые на самолетах. Они зондируют пространство с помощью двух лучей на разных частотах, по-разному поглощаемых озоном. Концентрацию озона в пространстве вычисляют по разнице амплитуд двух разнесенных по времени отраженных сигналов, которые собираются одним или несколькими телескопами. В таких лидарах особенно важно правильно выбрать частоты излучения, которые, кроме различного поглощения в озоне, должны иметь минимальное молекулярное и партикулярное поглощение. Наземный лидар дифференциального поглощения с диапазоном сканирования частоты излучения лазера от 286 до 292 нм создан специалистами Национальной лаборатории океанических и атмосферных исследований и Института изучения окружающей среды (США, шт.Колорадо). Поскольку на характеристики излучения влияет состояние атмосферы, в частности облачность, лидар установили на высоте 2,7 километра над уровнем моря. В состав установки включены два идентичных лазера на красителе, накачка производится от Nd:YAG-лазера. Лазеры возбуждаются последовательно с интервалом 400 мкс. Сигналы детектируются двумя автономными системами, оптимизироваными для приема сигналов с разных высот, и после обработки в специальных фильтрах поступают на фотоэлектронные умножители. Во время испытаний лидар работал непрерывно более суток, при этом отклонение длины волны излучения не превысило 0,01 нм. Исследования проводились на высотах от четырех километров над уровнем моря до уровня нижней стратосферы (примерно 12 километров). Шаг измерений по высоте составлял менее километра. Точность определения концентрации озона в тропосфере при ясной погоде для данной установки оказалась не хуже 10%. Лидар находится в эксплуатации с 1993 года. В последнее время лидарные установки все чаще устанавливают на самолетах для обнаружения ветровых потоков и измерения их скорости, определения истинной воздушной скорости летательного аппарата и других параметров. Кроме того, бортовые лидары используют в системах отслеживания рельефа местности и предупреждения о препятствиях. Одной из первых лазерных систем самолетного базирования стала система измерения истинной воздушной скорости LATAS (Laser True Airspeed System) производства английской фирмы Royal Signals and Radar Establishment (RSRE). В модернизированном варианте эта система применяется и сегодня. LATAS размещается в носовой части самолета. В ее состав входит лазер на углекислом газе с выходной мощностью 4 Вт, поляризационная оптика на четверть- и полуволновых пластинах, а также детектор на теллуриде кадмия и ртути с полосой 100 МГц. Для измерения воздушной скорости лидар фокусируют на расстояние 30-100 м перед носовой частью самолета, для измерения ветрового сдвига – на 250-300 м. Точность измерения скорости - 0,2 м/с. На многих воздушных судах, в частности на транспортных самолетах “Каравелла” , истребителях “Mираж”, вертолетах “Пума”, установлен доплеровский лидар Crouzet производства французской фирмы Crouzet SA. В его основе - СО2-лазер, излучающий непрерывный сигнал с выходной мощностью 3 Вт, диодный детектор с шириной полосы 200 МГц, выполненный на теллуриде кадмия и ртути, поляризационная волновая пластина и пластина Брюстера. Частота гетеродина задается при двойном прохождении луча через ячейку Брэгга. В системе использован телескоп Далла-Кирхама с эффективной апертурой 7,5 см. Принимаемые сигналы обрабатываются спектр-анализатором на ПАВ. Интервал измерения доплеровских скоростей составляет –25 ...+400 м/с, а дальность измерения - 10-100 м. Общий вес системы Crouzet - около 250 кг. По заказу правительств Франции и Великобритании консорциум фирм Dassault Electronique (Франция) и GEC Marconi (Великобритания) разрабатывает когерентный лазерный авиационный локатор CLARA (Coherent Laser Airborn Radar), работающий в диапазоне 10 мкм. Система предназначена для предупреждения о препятствиях, отслеживания рельефа местности, а также измерения воздушной скорости самолета и наведения на цель. Аппаратура, включающая СО2-лазер, сканер, процессор обработки сигналов и данных, размещается в контейнере под фюзеляжем. Обнаружение, классификация и отображение объектов производятся в реальном времени. Система CLARA проходила испытания на борту самолетов A6-E, HS748 и “Торнадо”. Доплеровский лидар для измерения скорости ветра WIND (Wind Infrared Doppler Lidar) разрабатывают французские фирмы CNRS и CNES и в сотрудничестве с германской DLR. В основе системы - лазер на углекислом газе с поперечной накачкой, формирующий одномодовое излучение. Лазер имеет выходную согласующую оптику с Гауссовой отражательной способностью, что позволяет выделить полезный сигнал на фоне поперечных мод высокого порядка, а также на фоне эхо-сигналов от целей с большой отражательной способностью. В системе использован телескоп Далла-Кирхама со смещенной осью (диаметр свободной апертуры - 20 см, коэффициент расширения апертуры - 15). Фокусное расстояние регулируется от 200 м до предельного значения. Летные испытания лидара проходили на борту самолета Falcon 20 (рис. 1). Во время испытаний производилось коническое сканирование в секторе 30о от надира. Период сканирования - 20 или 30 сек, частота повторения импульсов лазера - 4 или 10 Гц. Хорошие характеристики были получены при средней энергии излучения 360 мДж и частоте повторения 4 Гц. Успешно прошла испытания бортовая лидарная установка, разработанная специалистами Лаборатории им. братьев Райт ВВС США. Система предназначена для трехмерного измерения распределения скорости ветра по высоте (ветрового профиля) в реальном времени. Такие сведения важны для повышения точности десантирования и сбрасывания груза с самолета, увеличения вероятности поражения цели при ракетных и артиллерийских стрельбах. Сигнал, излучаемый лазером, отражается от перемещающихся по ветру частиц пыли и воздушных аэрозолей. Скорость ветра определяется путем измерения доплеровских сдвигов сигналов, отраженных от этих частиц. Сканирование лазерного луча - коническое, что позволяет производить измерения в различных направлениях. Размещение лидара в грузовом отсеке самолета показано на рис.2. Измерение ветрового профиля с помощью этой системы позволило повысить точность приземления при десантировании в 2-10 раз. Широкие возможности для изучения атмосферы Земли, проведения различных метеорологических и климатологических исследований открывают лидары космического базирования. Больших успехов в этой области достигли специалисты исследовательского центра Longley (НАСА). Они создали немало наземных и авиационных лидарных систем для изучения атмосферных аэрозолей и водяных паров, облаков, озоновых дыр. В частности, в рамках программы LITE (Lidar In-Space Technology Experiment) разработана первая в мире лидарная установка для изучения Земли из космоса. С помощью установки LITE изучалась структура облаков, процессы образования облачности, находящиеся в атмосфере аэрозоли, в том числе антропогенного происхождения, определялась высота приземного слоя атмосферы, измерялось горизонтальное распределение температуры и плотности воздушных слоев на высотах от 25 до 40 км, анализировались процессы отражения лазерного излучения от земной и морской поверхностей. LITE имеет традиционную конструкцию лидара прямого обнаружения: передающий лазерный блок, блок оптической юстировки и приемный блок. Передатчиком служит Nd:YAG-лазер с накачкой лампой-вспышкой. Для резервирования в передающем блоке установлены два идентичных квантовых генератора, из которых в рабочем состоянии находится только один. Передатчик одновременно формирует гармоники излучения с длиной волны 1064, 532 и 355 нм. Излучаемая мощность на этих частотах составляет 470, 560 и 160 мДж, соответствено. Блок оптической юстировки содержит поворотную призму для поддержания оптической центровки выходного лазерного луча и угла зрения приемника. В составе приемного блока - телескоп диаметром 1 м, оптические устройства передачи сигнала и электронные устройства предварительной обработки. Для разделения принимаемого сигнала на три частотные составляющие используется дихроичный расщепитель. В каналах обработки сигналов длин волн 532 и 355 нм установлен ударопрочный фотоэлектронный умножитель, для сигналов 1064-нм диапазона используется кремниевый лавинный фотодиод. В устройстве предусмотрены также узкополосные интерференционные фильтры и апертурный диск, которые служат для реконфигурации приборов при работе в дневное и ночное время. Размер дневной апертуры составляет 1,1 мрад, ночной – 3,5 мрад. После прохождения фотоприемников и фильтров сигналы поступают в электронный усилитель и аналогово-цифровой преобразователь (АЦП). Ширина полосы усилителя - 2,1 МГц. АЦП - 12-разрядный, с тактовой частотой 10 МГц. Период стробирования данных - 550 мкс. Электронные устройства обработки включают также резисторную схему, установленную после первого каскада усиления. Схема обеспечивает подавление сигнала в пределах 0-63 дБ. Благодаря этому сильный сигнал, отраженный от плотных облаков или поверхности Земли, не выходит за рамки динамического диапазона 12-разрядных АЦП. Основные вычислительные операции производит быстродействущий сигнальный процессор. Масса аппаратуры составляет 990 кг. Потребляемая мощность в рабочем состоянии - 3,1 кВт, в резервном - 560 Вт. Мощность излучения лазера и расходимость луча выбираются таким образом, чтобы интенсивность лазерного пучка на поверхности Земли была значительно ниже принятых санитарных норм. Cобранные космическим лидаром LITE данные передавались на Землю двумя потоками: с низкой (~20,8 кбит/с) и высокой (~2 Мбит/с) скоростью передачи. Первый поток транслировался через систему связи S-диапазона, второй - через систему телеметрической связи. По мнению специалистов, испытания лидаров LITE в космических условиях прошли успешно. В ходе эксперимента собран большой объем высокоточной информации, на основании которой сформирована общедоступная база данных о состоянии атмосферы. Эксперимент подтвердил возможность применения лидаров в длительных орбитальных полетах. Ожидается, что новые разработки лазеров с диодной накачкой позволят снизить потребляемую мощность, что даст возможность устанавливать лидары на небольших спутниках.
Лазерные лидарные комплексы (ЛЛК) также предназначены для оперативного дистанционного контроля биологической и химической обстановки. Комплексы осуществляют наблюдение за аномальными изменениями атмосферы, обусловленными наличием в ней аэрозолей, а также определение параметров перемещения облаков. Комплексы являются автоматизированной дистанционной системой оперативного контроля экологической обстановки промышленных центров и способны быстро, в автоматическом режиме обнаруживать аварии и обеспечивать информационную поддержку действий аварийно-спасательных служб.
Проблема мониторинга техногенного загрязнения окружающей среды и особенно атмосферного воздуха является в настоящее время чрезвычайно актуальной как в экологическом аспекте, так и в связи с современными проблемами общественной безопасности. Технологии лазерного дистанционного зондирования атмосферной среды дают возможность устранить недостатки и ограничения, присущие традиционным методам локального мониторинга: низкая информативность, трудность обеспечения широкой зоны покрытия, большое время развертывания сетей локальных датчиков и т.п. Особенно эффективным представляется применение мобильных многофункциональных комплексов дистанционного лазерного зондирования – мобильных лидаров. Создание малогабаритного мобильного лидарного комплекса для мониторинга и прогнозирования экологической обстановки над критически важными (опасными) объектами и в районах вероятных террористических атак позволит:
определять концентрации широкого спектра веществ на расстояниях до 8 км;
в режиме реального времени отображать на карте местности районы загрязнения и количественные характеристики масштаба заражения;
определять распространение ядовитого облака;
прогнозировать развитее ситуации над критическими объектами;
контролировать содержание опасных веществ атмосфере и оповещать сигналом тревоги в случае превышения ПДК или обнаружения выбросов на контролируемых объектах или территории.
Сканирование сектора ответственности может осуществляться в различных временных режимах: непрерывном, периодическом и по требованию оператора (дежурного). Лазерный анализ позволяет определить в течение нескольких минут факт аномального выброса, вид вещества, интенсивность и направление его распространения. Среди типовых аварийно – химических опасных веществ (АХОВ) можно выделить следующий перечень загрязнителей, заражение которыми представляет интерес на большинстве территорий, требующих усиленного контроля:
Аммиак - NH 4
Диоксид серы - SO 2
Диоксид азота - NO 2
Соляная кислота - HCl
Продукты нефтепереработки.
Помимо указанных выше веществ существуют угрозы аварий на специфических объектах по производству, хранению и утилизации особо опасных химических веществ, а также СДЯВ и ОВ.
Использование высокочувствительных и разработанных лидарных методов зондирования атмосферы на наличие опасных веществ, таких как дифференциальное поглощение (DIAL) и дифференциальное рассеяние (DISC) позволяет измерять величины концентраций на уровнях ПДК рабочих и жилых зон. Для проведения комплексного анализа и прогноза экологической ситуации необходимо, чтобы все полученные данные были согласованы в пространстве, как по размерам зон покрытия, так и по пространственному разрешению, синхронизированы во времени и имели единый формат.
Нештатная экологическая ситуация или террористический акт сопровождается характерным аэрозольным выбросом. Аэрозольный лидар, построенный на основе безопасного для глаз Er - лазера или Nd:YAG - лазера, определяет наличие атмосферного аэрозоля и измеряет его концентрацию, строит пространственное распределение в реальном времени и анализирует его физическую природу. Для этого аэрозольный Ми-лидар и поляризационный лидар объединены в единый функциональный узел.
Лидар дифференциального поглощения видимого и ближнего ИК-диапазона на основе двухканального перестраиваемого импульсного лазера на сапфире с титаном дистанционно измеряет распределение концентрации окислов азота, серы и широкого набора неорганических загрязнителей воздушной среды на уровне ПДК.
Многоспектральный лидар дифференциального поглощения дальнего ИК-диапазона на основе перестраиваемого импульсного СО 2 -TEA лазера измеряет поле концентраций широкого класса органических веществ, а также озона.
Объединение аэрозольного и флуоресцентного лидара, а также лидаров дифференциального поглощения видимого, УФ, ближнего и дальнего ИК-диапазонов на единой платформе увеличивает габариты системы до контейнера, способного разместиться на носителе с грузоподъемностью несколько тонн. Поэтому целесообразно разделить возлагаемые на комплекс задачи следующим образом:
1. Детектирование аэрозольных выбросов и слежение за динамикой (аэрозольный лидар);
2. Детектирование аэрозольных выбросов и идентификация неорганических АХОВ (аэрозольный лидар, коротковолновый ДИАЛ);
3. Детектирование аэрозольных выбросов и идентификация органических АХОВ и ОВ (аэрозольный лидар, длинноволновый ДИАЛ или пассивный ИК- спектрометр).
Дополнительная информация. Состав и технические характеристики предлагаемых вариантов:
1. Детектирование аэрозольных составляющих выброса можно определить с помощью одного лазера. Лазер для аэрозольного канала может быть построен на базе безопасного для глаз эрбиевого волоконного излучателя с длиной волны 1,55 мкм или лазера на неодимовом стекле 1,064 мкм. Высокая частота следования импульсов позволяет производить сканирование с высокой угловой скоростью без потери углового разрешения, а короткие лазерные импульсы обеспечивают высокое пространственное разрешение.
Основные ТТХ комплекса
|
Параметр |
Значение |
|
не менее 5 км |
|
|
не более 0,5 м |
|
|
Углы обзора |
|
|
0,5 – 11 мкм |
|
|
1,55 (1,064) мкм |
|
|
не более 130 с |
|
|
Энергия импульса |
|
|
Длительность импульса |
|
|
Частота следования импульсов |
|
|
Диаметр приёмо-передающего телескопа |
|
|
Вес системы |
Менее 1 т. |
)* - с автоматическим сканированием)** в зависимости от шага сканера и выбранного сектора обзора
Состав оборудования:
Поворотная платформа (одно или двухзеркальный сканер)
Система термостабилизации отсеков комплекса
Аппаратура проводной и беспроводной передачи данных
Бортовой компьютер
Лазерный излучатель аэрозольного лидара
Система синхронизации подсистем комплекса
Приемо-передающий телескоп
Приемники излучения
Аналоговый электронный блок управления и диагностики
Цифровой электронный блок обработки данных
Система автономного электропитания
Система видео наблюдения
2. Детектирование аэрозольных составляющих выброса с возможностью идентификации неорганических АХОВ подразумевает использование наряду с аэрозольным лидаром лидара дифференциального поглощения в УФ, видимом и ближнем ИК-диапазоне. Линии поглощения основных АХОВ лежат в диапазоне перестройки лазера на титан сапфире, так для SO 2 это – 300,05 нм (On) и 299,51 нм (Off), для NO 2 – 448,25 нм (on) 446,83 нм (off).
Основные ТТХ комплекса
|
Параметр |
Значение |
|
Максимальная дальность измерений в режиме сканирования |
не менее 8 км |
|
Максимальная дальность измерений в режиме измерения |
не менее 3 км |
|
Минимальная дальность измерений в режиме сканирования |
не более 0,5 м |
|
Углы обзора |
|
|
Вертикальное направление (угол места)* |
|
|
Горизонтальное направление (азимут)* |
|
|
Размер детектируемых аэрозолей |
0,5 – 11 мкм |
|
Длина волны в режиме аэрозольного сканирования |
1,55 (1,064) мкм |
|
Время сканирования выбранного сектора ** |
не более 130 с |
|
Пространственное разрешение в режиме сканирования |
|
|
Энергия импульса |
1 – 2 мДж (1,55 мкм) 100 мДж (1,064 мкм) |
|
Длительность импульса |
|
|
Частота следования импульсов |
|
|
Ti:Sph лазер (2 шт.) |
|
|
Диапазон длин волн |
350 – 480 нм 230 – 310 нм |
|
Частота следования импульсов |
|
|
Энергия импульса L=450 нм L=300 нм |
25 мДж 6 мДж |
|
Вес системы |
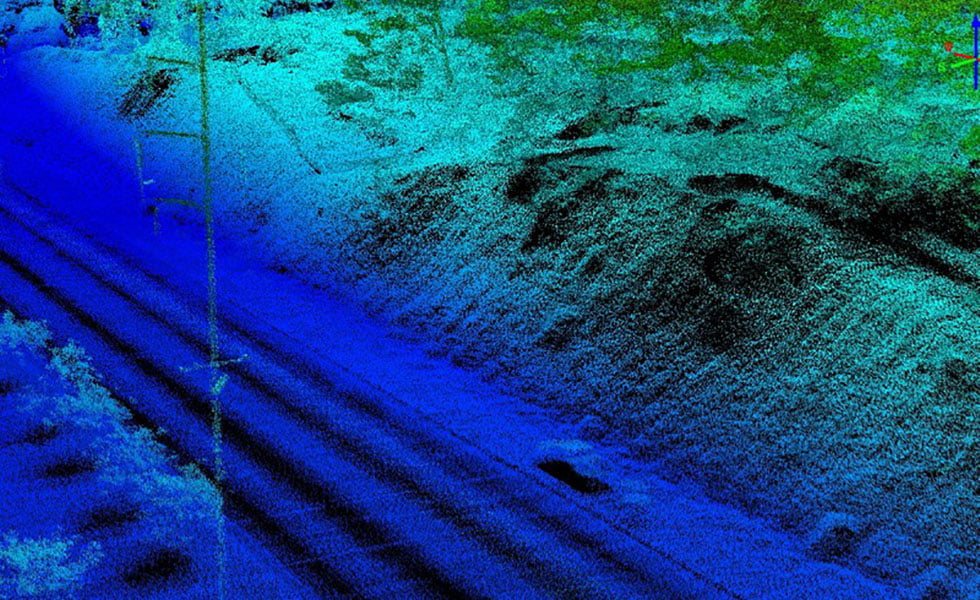
Вам необходимо документировать обстоятельства ночной аварии на дороге? Проектируете ирригационные системы в засушливых районах? Или изучаете возможные археологические памятники, скрытые лесом или другими деталями? Традиционные методы 3D-съемки и получения геопространственных данных затратны по времени и денежным средствам. Но теперь есть более эффективные и быстрые решения для таких целей. LiDAR (Light Detection and Ranging) - это технология дистанционного зондирования, которая использует быстрые лазерные импульсы, чтобы создать модель рельефа. LiDAR отлично подходит, когда необходимо создать цифровые отображения поверхности земли с высоким разрешением для различных целей. В прошлом организации были вынуждены использовать в каждом случае отдельные системы со своими особенностями.
Теперь у них есть возможность пользоваться системой LiDAR, которую устанавливают на беспилотники, чтобы получилось единое устройство для 3D-картографирования. Систему ScanLook LiDAR серии А устанавливают на летающую платформу DJI Matrice 600, что позволяет получить для работы эффективное, универсальное и точное решение для 3D-зондирования на основе беспилотных технологий. Примеры практического применения связки LiDAR и дроновМоделирование ландшафтаПростейший пример, когда новые технологии могут существенно облегчить и сделать еще эффективнее работу - уборка мусора и грязи. Известно, что оплата обычно производится за квадратный метр, но расчеты не всегда бывают точны, особенно, если имеется большой разброс мусора, листьев, а на территории также растут кусты и деревья. LiDAR предлагает значительную экономию по сравнению с методами методам наземного исследования.
LiDAR значительно сокращает различного рода затраты на методы исследования рельефа. Применяя метод дистанционного исследования объектов разного типа, включая траву, листья или деревья, LiDAR может определить их положение, скорость перемещения (для движущихся объектов) и другие характеристики. Для этого используется пульсирующий лазерный луч, который отражается от поверхности объектов. Результатом такого процесса становится 3D-модель топографических контуров ландшафта, с которой затем могут работать пользователи. Если же подключить к процедуре исследования дрон Matrice 600 со ScanLock, то сканирование будет происходить со скоростью более 4 тыс. кв. м. в минуту. А теперь представьте, сколько можно сделать работы за 20 минут полетного времени? Документирование ЧП и несчастных случаевLiDAR - это активная система, которая использует для создания образов нужных объектов ультрафиолет и ближний инфракрасный диапазон. Это важно, если обстоятельства не позволяют задействовать для качественного картографирования внешнее освещение. Например, такой метод может потребоваться для съемок обстоятельств ночной автомобильной аварии. Для этого лучше всего задействовать дрон Matrice 600 с технологией ScanLook, чтобы буквально за один полет над местом аварии зафиксировать и обработать всю необходимую визуальную информацию.
Поскольку предлагаемое решение базируется на беспилотных технологиях, то пользователи практически немедленно получают точную информацию, подкрепленную визуальными деталями. Затем все это можно использовать в качестве доказательства в судебных процессах. Кроме этого, высокая скорость обследования с помощью воздушного сканирования помогает быстрее начать процесс эвакуации раненых или погибших людей, поврежденных автомобилей, а также быстрее приступать к уборке территории. Таким образом можно за сравнительно короткое время освободить проезжую часть для автомобилей, что особенно важно на оживленных трассах, а также сэкономить значительные средства на всех этапах работы. Сельское хозяйства и ландшафтная планировкаДругой пример успешного применения новых технологий 3D-картографирования - большие фермы, где требуется создавать эффективную ирригационную систему. Например, на больших плантациях риса фермерам приходится создавать водозащитные насыпи. Это требует точного знания рельефа и особенностей почвы. Иначе вся создаваемая система может оказаться неэффективной и бесполезной. И опять оптимальным решением становится дрон Matrice 600 с установленной на нем технологией ScanLock. Сбор данных будет происходить со скоростью 183 метра за один проход. Процесс работы с одним большим полем не займет много времени. При этом не нужно, как раньше, ждать, когда обрабатываемые поля высохнут, чтобы на них можно было бы вывести соответствующую технику для сбора данных. АрхеологияТам, где традиционные методы обследования больших, ценных с исторической точки зрения, ландшафтов требовали не одного года работы, теперь можно использовать технологию LiDAR, чтобы выполнить процесс по 3D-картографированию за считанные минуты. И снова наилучшим вариантом для такой процедуры будет установка ScanLock на дрон Matrice 600. “Потерянные” места и целые древние города будут открыты за самое короткое время. 22 мая 2017Сегодня все большую популярность набирает технология светового обнаружения и определения дальности - LIDAR (Light Identification Detection and Ranging). Наши эксперты следят за развитием индустрии и подготовили обзор статьи, посвященной этой технологии. Технологии дополнят камеры и радары в автономном транспорте Полностью автономный транспорт будущего будет полагаться на комбинацию различных сенсорных технологий - продвинутых систем зрения, радара и системы светового обнаружения и определения дальности (лазерного локатора). Из этих трех, лазерный локатор на данный момент - самая дорогостоящая часть уравнения, и весь мир прилагает усилия по снижению этих цен. Сейчас на рынке доступны механические лазерные локаторы, стоящие сотни долларов. Эти цифры необходимо уменьшить для того, чтобы массовое применение лазерных локаторов оправдывало себя в гибкой автомобильной отрасли. Помимо фактора цены, поставщики лазерных локаторов должны показать высокую производительность и надежность своих продуктов. Для продвинутых систем помощи водителю и автоматизированного вождения недостаточно иметь надежность в 99%. В критических (с точки зрения безопасности) аспектах автомобильного производства, оборудование должно показывать надежность «шести девяток» - 99,9999%. Важность продвинутых технологий в автомобильном транспорте не может быть переоценена. Предложенная Intel сделка на сумму 15,3 миллиарда долларов по приобретению Mobileye, израильского поставщика систем компьютерного зрения, хороший тому пример. Производитель чипов и Mobileye объединились с BMW в прошлом году для совместной работы над технологией автономного транспорта. Лазерный локатор - ключевой компонент этой технологии, и инвесторы держат свои кошельки широко раскрытыми для стартапов, работающих над этой технологией. В марте 2017 года инвесторы вложили 10 миллионов долларов в TetraVue - стартап, работающий над лазерным локатором в городе Карлсбад, Калифорния. Список инвесторов включает в себя Foxconn, Nautilus Venture Partners, Robert Bosch Venture Capital и Samsung Catalyst Fund. Стартап программного обеспечения для самоуправляемых машин Autonomic, расположенный в Пало-Алто, Калифорния, получил около 11 миллионов долларов от Ford Motor и Social Capital. Четыре сооснователя ранее работали в Pivotal Labs. Движущие силы технологий Technavio прогнозирует совокупный среднегодовой темп роста для мирового рынка автомобильных датчиков лазерной локации более чем на 34% до 2020 года (Рисунок 1). По оценке исследующей рынок фирмы, рынок лазерных локаторов составил 61,61 миллион долларов в 2015 году, с наибольшим спросом в Европейском/Средневосточном/Африканском регионах, а также в Северной и Южной Америке. В июне 2016 года компания в открытый доступ выложила отчет «Глобальный рынок автомобильных датчиков лазерной локации 2016-2020», и будет обновлять этот отчет в течение третьей четверти текущего года. «Технология лазерной локации в автомобильной индустрии испытывает быструю эволюцию, как в рамках технического прогресса, так и в рамках динамики рынка» , - утверждает Сиддхарт Джайсвал , один из ведущих аналитиков индустрии исследований автомобильной электроники Technavio. Среди ключевых разработок, названных Technavio:
Рисунок 1.
«Лазерный локатор находится на очень прибыльной позиции среди датчиков автономного вождения» , - утверждает Джайсвал. «360-градусная карта - его главное отличие от других сенсорных технологий, а его возможности в отношении обнаружения объектов даже в условиях полного отсутствия света нашли свое место среди оригинальных производителей оборудования. К тому же, явное падение цены самого дорогого компонента беспилотного автомобиля - блока датчиков лазерной локации, вероятно приведет к принятию автомобильных лазерных локаторов. Например, в 2016 году, Velodyne представила свой новый лазерный локатор ULTRA Puck VLP-32A. По заявлениям, это самый доступный лазерный локатор, способный, по определению SAE (Сообщество автомобильных инженеров), достигать уровней автономного вождения 1-5, а также он очень компактный, по сравнению с предыдущими версиями продуктов из этой индустрии. Из-за твердотельной архитектуры, сенсор достаточно маленький, чтобы быть установленным на наружные зеркала заднего вида, при этом радиус 3D-зондирования увеличен до 200 метров (656 футов). Velodyne установила целевое ценообразование из расчета менее чем 300 долларов за один блок, что в масштабах массового автомобильного производства - значительное снижение цены с 7900 долларов за предыдущий компактный блок лазерного локатора» . Более того, лазерный локатор может быть разработан с использованием проверенных технологий полупроводниковых процессов, а твердотельная версия не имеет движущихся частей. «Лазерный локатор считается ключевой технологией для точного 3D-картирования, «ощущения автомобиля» и навигации» , - утверждает Пьер Камбу , директор отдела работы с изображениями компании Yole Developpement. «Происходит соревнование в производительности и долговечности, для этого используются коротковолновые инфракрасные (SWIR) диоды, лавинные фотодиоды или однофотонные лавинные фотодиоды. Также прилагаются большие усилия по снижению цен. Это направлено в основном на то, чтобы сделать лазерный локатор полупроводниковым с помощью управляемых лазеров, микрозеркал МЭМС или детекторных решеток» . Но Камбу заметил, что существуют разные подходы к автономному вождению, и лазерный локатор не является необходимым для каждого из них. «Лазерный локатор - это основополагающее оборудование для беспилотного транспорта, который я предпочитаю называть роботизированным транспортом. В будущем будет существовать много уровней автономности. Лазерный локатор может быть необходим для экстренного торможения в городских условиях, вероятно в сочетании с радарами и камерами. Этот мультимодальный подход сейчас четко определен. Никто не ставит его под сомнение» . Рынок лазерных локаторов будет расти по мере уменьшения цен: от 600 миллионов долларов на сегодняшний день до 1,2 миллиардов в течение следующих пяти лет (Рисунок 2). «Сегодня три точки входа в автомобильную индустрию: 3000 долларов, 300 долларов и 30 долларов» , - заявил он. «Камеры на текущий момент находятся на ценовом уровне в 30 долларов, а лазерный локатор на уровне 3000 долларов. Цель производителей лазерный локаторов сейчас - снизить цену и достигнуть цели в 300 долларов, без значительных потерь производительности. Такие лазерные локаторы, вероятно, созданные на основе твердотельных подходов, появятся на рынке в течение следующих трех лет» . Это малая часть рынка зрительных датчиков. «Консенсус здесь в том, что прибыль от автомобильных радаров и автомобильного зрения почти одинакова, но зрение на 50% состоит из современной системы содействия водителю (ADAS) и на 50% - из системы помощи при парковке», - сказал Камбу. «Мы достигли оборота датчиков автомобильного зрения в 1 миллиард долларов в 2016 году, и среднегодового темпа роста в 24%. Верхняя черта - 7.3 миллиарда прибыли в сфере датчиков автомобильного зрения к 2021 году».
Что работает, а что нет Амин Каши , директор отдела современных систем содействия водителю и автономного вождения в Mentor Graphics, дочерней компании Siemens, заявил, что интерес к лазерным локаторам возник более десяти лет назад, в связи с высокой ценой радаров на тот момент, которые стоили по 500 долларов за штуку. Лазерные локаторы тогда были чрезвычайно дорогими, до 260000 долларов за блок. «Три года назад, некоторое количество компаний или стартапов начали интересоваться сферой лазерных локаторов и инвестировать в неё средства» , - говорит Каши. «Каждая крупная компания внезапно начала вкладывать деньги или покупать компании, работающие в сфере лазерных локаторов» . В число таких компаний входили Continental и TRW. Каши ранее работал в компании Quanergy Systems, которая разработала механический лазерный локатор, а сейчас работает над лазерным локатором с фазированной решеткой. Твердотельный лазерный локатор Quanergy продается по 250 долларов за штуку. Тем временем, Mentor Graphics предоставляет оригинальным производителям оборудования и крупным компаниям аппаратное и программное обеспечение, а также услуги по проектированию в сфере лазерных локаторов. «Мы также предоставляем программное обеспечение обработки изображений, которое может быть запущено на их датчиках. В конце концов, все сенсоры должны быть каким-то образом соединены. Необходима вычислительная платформа или система, которая собирает всю эту разную информацию и делает её понятной для системы принятия решений. Вот в чем заключается наш интерес» . «Камеры, лазерные локаторы и радары дополняют друг друга, восполняя недостатки каждой технологии» , - заявил он. «Это играет критическую роль, так как лазерный локатор может быть менее эффективным в тумане, при низких облаках, песчаных бурях, сильном дожде и сильном снегопаде». «Все еще необходимо иметь очень высокое разрешение датчиков, используемых на беспилотном транспорте» , заметил Амин Каши. «Существует множество компаний, работающих над технологиями лазерной локации, множество стартапов и у них очень убедительные концепции. Интересно будет посмотреть, будет ли их путь к коммерциализации успешным. Некоторые из них совсем неоригинальны, но переход от отличной концепции к датчику автомобильного класса - очень сложная задача. И она требует больших вложений» . Сравнения между различными технологиями лазерной локации не всегда прямолинейны, и растущая конкуренция не делает их проще. «Существует множество обманчивой информации» , - заявляет Луай Эльдада , исполнительный директор стартапа Quanergy. «Есть люди, которые делают традиционные механические лазерные локаторы: большие, крутящиеся механические лазерные локаторы, используемые на вертолетах, и они называют их гибридными твердотельными, потому что содержание полупроводника в них не равно нулю. Это просто обман». По словам Эльдады, такие продукты имеют один маленький чип, в продукте размером с ведро. «В автомобильной сфере никто уже не использует механические лазерные локаторы. Мы уверены, что наш твердотельный локатор является самой захватывающей разработкой в этой сфере». В прошлом году Quanergy получила 90 миллионов долларов во втором инвестиционном раунде, что увеличило общую сумму частных инвестиций до 150 миллионов долларов, а также увеличило стоимость самой компании более чем до 1 миллиарда долларов. Delphi Automotive, GP Capital, Motus Ventures, Samsung Ventures и Sensata Technologies совершили вклады во втором инвестиционном раунде. XenomatiX - другой стартап, специализируйщийся на твердотельных лазерных локаторах. «Стартапы сейчас лидируют в разработках, которые считаются необходимыми при автономном вождении» , - заявил Филип Гайенс , исполнительный директор Бельгийской компании. «Некоторые большие компании тратят много денег и серьезно инвестируют, чтобы получить датчики и программное обеспечение, необходимое для автономного вождения. Большинство этих компаний, с точки зрения технологий, двигаются в одном направлении. Мы ожидаем, что все они столкнутся с серьезными трудностями. Мы же, напротив, двигаемся в другом направлении и делаем вещи немного иначе. Мы считаем, что это лучший способ преодолеть трудности» . «XenomatiX пытается избавиться от дезориентации при зондировании среди систем лазерных локаторов, связанной с тем, что многие системы используют прямое время полета, испуская один луч света или одну вспышку света» , - заявил Гайенс . «Метод, который используем мы, заключается в отправке тысяч лучей одновременно. Это довольно сложно. Мы также придерживаемся техники безопасности для защиты глаз. Это самая важная трудность, которая одинакова для всех нас. Мы испускаем множество лучей одновременно и это делает все еще сложнее. С другой стороны, это делает систему более надежной в реальных условиях, где несколько лазерных локаторов работают одновременно». Некоторые компании утверждают, что камер и радаров для автономного вождения достаточно, однако Гайенс так не считает. Он утверждает, что вождение автомобиля происходит в объемном мире, а лазерный локатор незаменим при зондировании во всех направлениях. Неразбериха на рынке Одна из больших проблем в индустрии - спрос и предложения между оригинальными производителями оборудования и ведущими компаниями. Оригинальные производители оборудования ожидают от ведущих компаний, необходимых им продвинутых технологий, в то время как ведущим компаниям требуются проверенные технологии, прежде чем они смогут представить их оригинальным производителям оборудования. Согласно многочисленным инсайдерам в индустрии, поставщики автомобильных частей не хотят иметь большие затраты на научно-исследовательские и опытно-конструкторские работы без обязательств оригинальных производителей оборудования по объемам закупок. «Находящееся на рассмотрении приобретение компанией Intel фирмы Mobileye - большой шаг вперед во введении высокотехнологичных продуктов в автомобильную индустрию» , - утверждает Гайенс . Соревнование на пути к беспилотному транспорту и количество технологических инноваций, которое требуется, чтобы достичь этого, меняет некоторые из использованных ранее подходов. «На данный момент, технология лазерной локации - совершенно новое слияние технологий» , - считает Жан-Ив Дешен , президент Квебекской компании Phantom Intelligence. «Это слияние обусловлено автомобильной индустрией» . Пять-десять лет назад лазерный локатор преимущественно использовался в архитектурных, картографических и военных целях. Блоки выглядели как огромные, громоздкие устройства с огромным количеством зеркал. «Многие находятся в поиске решения» , - заявил он. «Недавние исследования и компании, о которых мы много слышим, сейчас пытаются заменить эти зеркала. Мы воспроизводим принцип сканирования лазерного локатора путем использования зеркал МЭМС и управления лучем. Много методов картирования двигается в этом направлении. В Phantom Intelligence мы уверены, что решение заключается в использовании вспышечного лазерного локатора. Вспышечный лазерный локатор- скорее аналог 3D-камеры. Вместо узкого луча, который постепенно проходит по полю зрения для воссоздания изображения, происходит вспышка лазерного импульса на большом пространстве, а для восстановления изображения используется множество пикселей» . «Недостаток лазерного локатора - эхо, возвращающееся на датчик» , - заметил Дешен , сторонник «более умной» обработки сигналов, как он её называет. Он считает, что будет существовать пять уровней автономного вождения, полностью автономный транспорт появится в 2025 году, а широкое распространение получит в 2030 году. Реальное положение дел Лазерный локатор – хорошо известная технология, которая наконец нашла себе выгодное применение на рынке. «Сам принцип лазерной локации, отправленный с импульсом свет и эхо времени полета сильно не изменился» , - заявил один из источников в индустрии. «Физический принцип никогда не менялся с момента изобретения, уже на протяжении 40 лет. Изменения касаются скорее составных частей и системной интеграции. Никакого изменения фундаментального принципа» . Источник заметил, что вспышечный лазерный локатор находился в разработке на протяжении последних пяти лет, и за это время получил сходства с датчиком КМОП. «Технология вспышечного лазерного локатора - сфера, требующая пристального внимания. Она предоставляет очень дешевое решение, но не высокую производительность» . Кевин Уотсон , старший руководитель отдела разработки товаров Microvision (Редмонд, Вашингтон), не согласен. «Я не считаю, что это приведет к каким-то результатам» , - высказался он о вспышечном лазерном локаторе. «На протяжении многих лет Святым Граалем лазерных локаторов считались лазерные сканеры на основе МЭМС-зеркал, потому что они невероятно маленькие, относительно недорогие в производстве в больших количествах и очень надежные. К тому же, достаточнокомпактные, чтобы спрятать несколько штук в автомобиле» . Уотсон называет лазерный локатор «самым важным датчиком» в автомобильной электронике. «Системы зрения - это здорово, но они абсолютно пассивны, а лазерный локатор активен» . Но и у лазерного локатора есть свои ограничения. Радар может распознать стену и имеет большую дальность действия, способен работать в тумане, а лазерная локация и зрение могут быть сбиты с толку. «До достижения четвертого уровня автономности (предшествующего самому высокому уровню) еще далеко» , - заявил Уотсон . «Это не будет реализовано на протяжении следующих десяти лет. Это очень, серьезная проблема. Еще слишком многое нужно сделать» . Похожие публикации
|